로봇 설정
로봇의 일반적인 기능과 사용 환경을 설정할 수 있습니다.
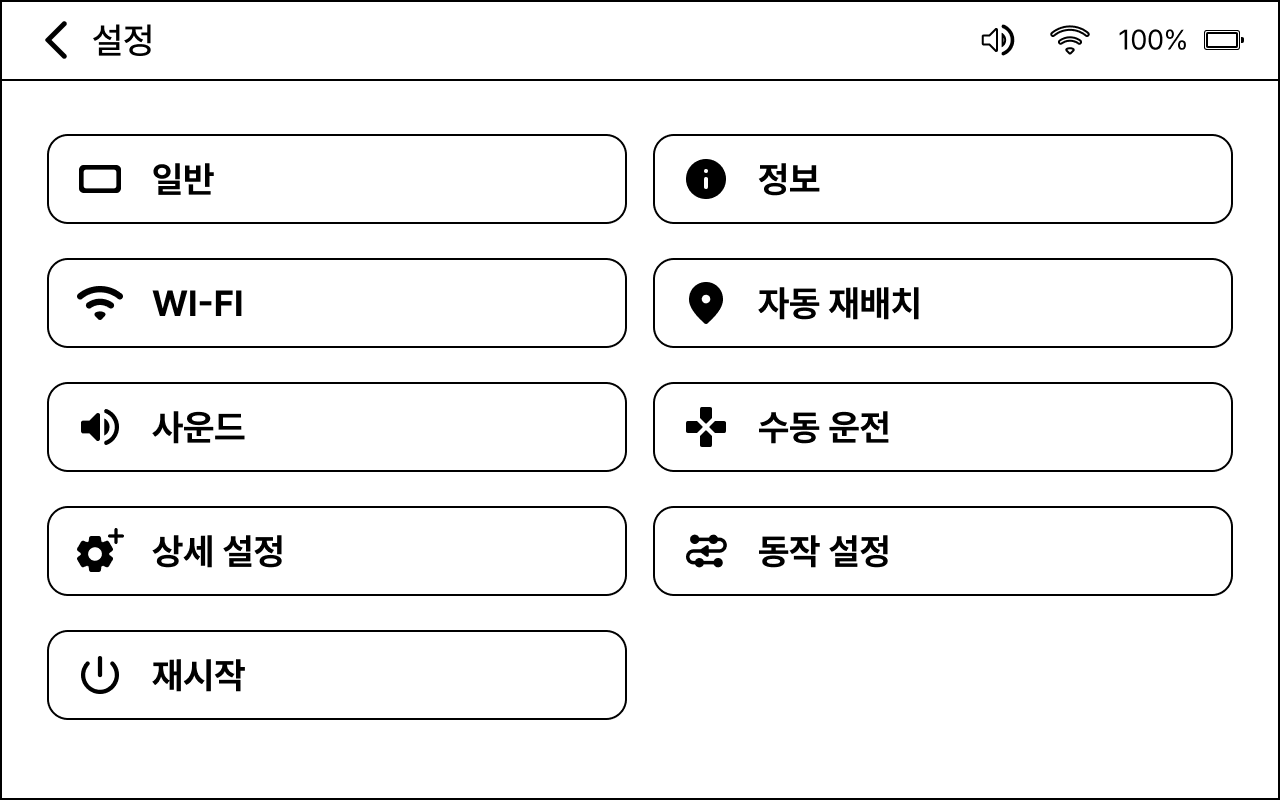

일반
-
홈 화면의 디스플레이 방식을 설정합니다.
목적지: 목적지 이름이 표시됩니다.
키패드: 숫자 패드가 표시되어 목적지 이름을 직접 입력합니다.
-
원하는 언어로 설정합니다. 영어, 일본어, 한국어 순으로 표시됩니다.
-
로봇 이동 중에 일시정지 방법을 설정합니다.
싱글탭: 화면을 한 번만 누르면 로봇이 일시정지 합니다.
더블탭: 화면을 연속으로 두 번 누르면 로봇이 일시정지 합니다.
-
자주 사용하는 경로를 설정합니다.
정보
로봇에 설치되어 있는 소프트웨어와 하드웨어 사양, 로봇에 설정되어 있는 위치와 맵 정보 등 상세 정보를 확인할 수 있습니다.
로봇 이름 옆의 변경을 누르면 로봇의 이름을 변경할 수 있습니다.

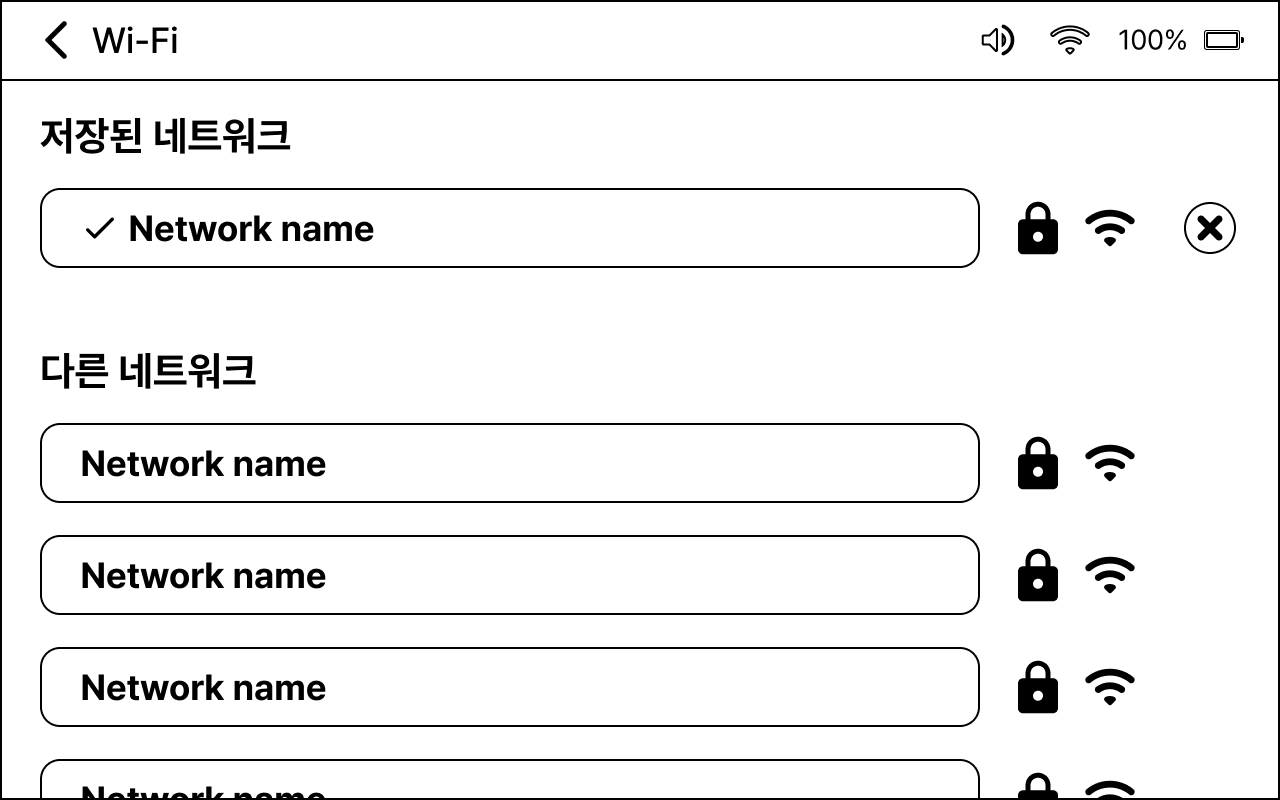
와이파이
로봇에 연결되어 있는 Wi-Fi를 확인할 수 있습니다.
목록 중 사용할 Wi-Fi 버튼을 눌러 비밀번호를 입력한 후, 연결을 누르세요.
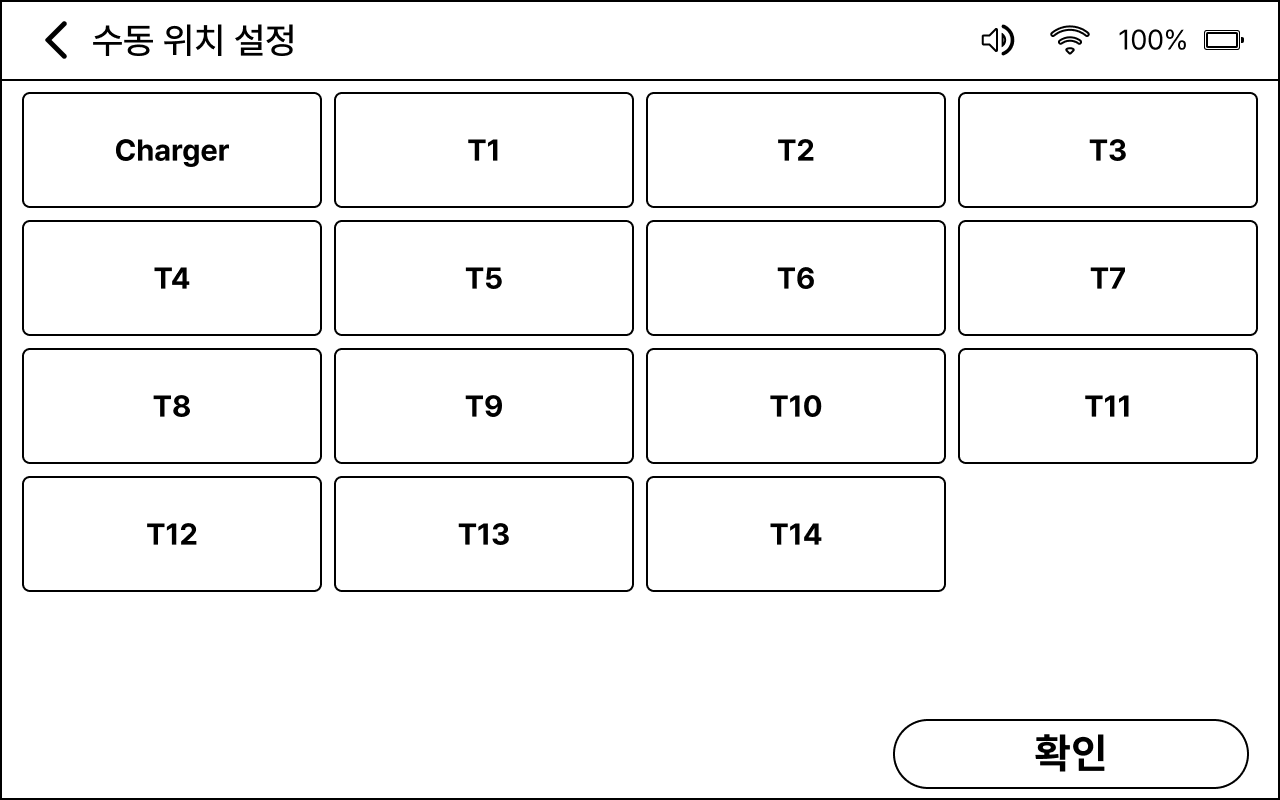
로봇 위치 설정
목적지 위치를 재설정할 때 사용합니다. 로봇 재배치 시 설정한 목적지 지점에서 설치 기사가 설정한 방향까지 맞춰서 로봇 재배치를 진행해야 위치가 올바르게 재배치됩니다.
홈 화면에서 로봇이 서있는 위치에 재배치할 목적지를 길게 눌러도 위치 재설정이 가능합니다.

사운드
상황에 따라 음성이 설정되어 있습니다. 로봇의 이동음과 메시지 음량을 확인하고 조절할 수 있습니다.

또한 터치스크린 상단바의 사운드 아이콘을 길게 누르면 이동음과 메시지 음량을 조절할 수 있는 팝업이 표시됩니다.
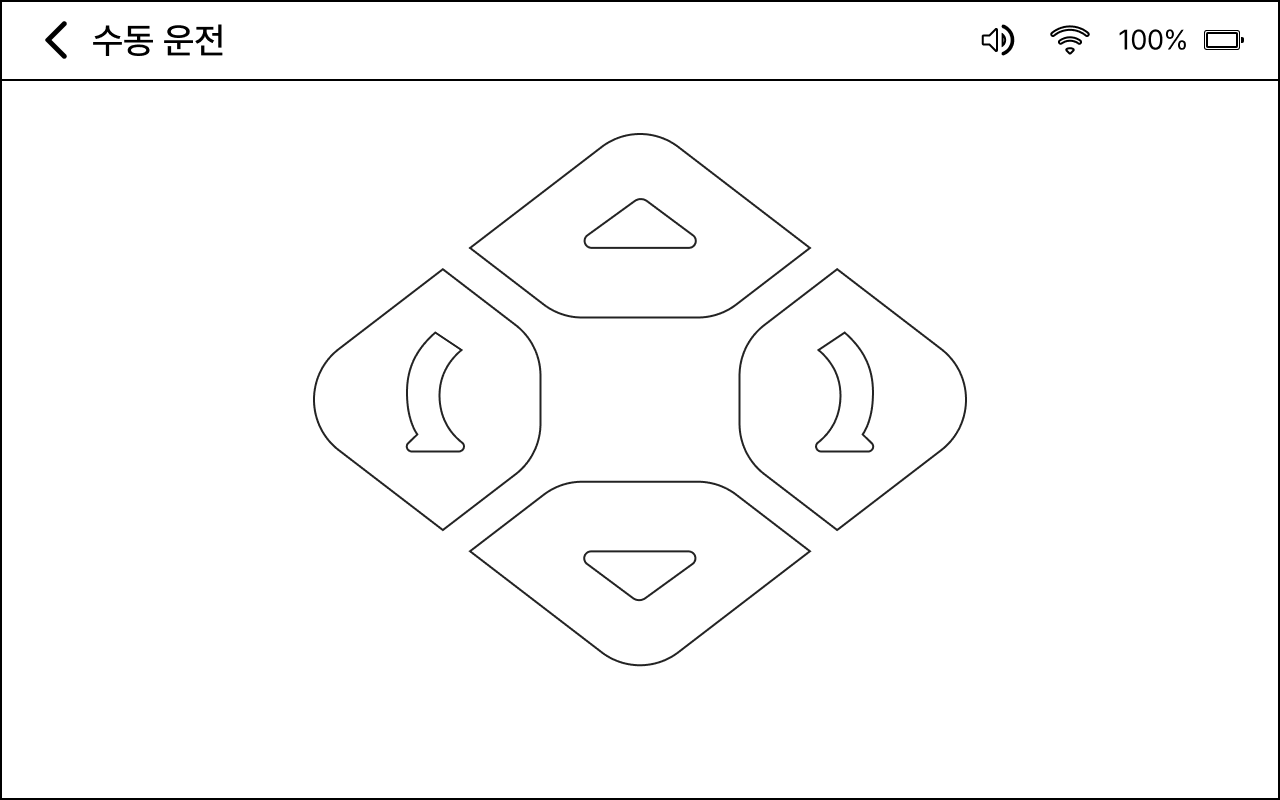
화면에 표시되는 화살표를 이용해 수동으로 로봇을 조작할 수 있으며, 손으로 직접 로봇을 밀어 이동시킬 수 있습니다. 또한 로봇의 바퀴가 잠겼을 때 수동 운전을 사용해 로봇을 원하는 장소로 이동할 수 있습니다.
수동 운전
[주의]
손으로 로봇을 직접 밀 때는 트레이 부분을 만지지 않도록 주의하세요.
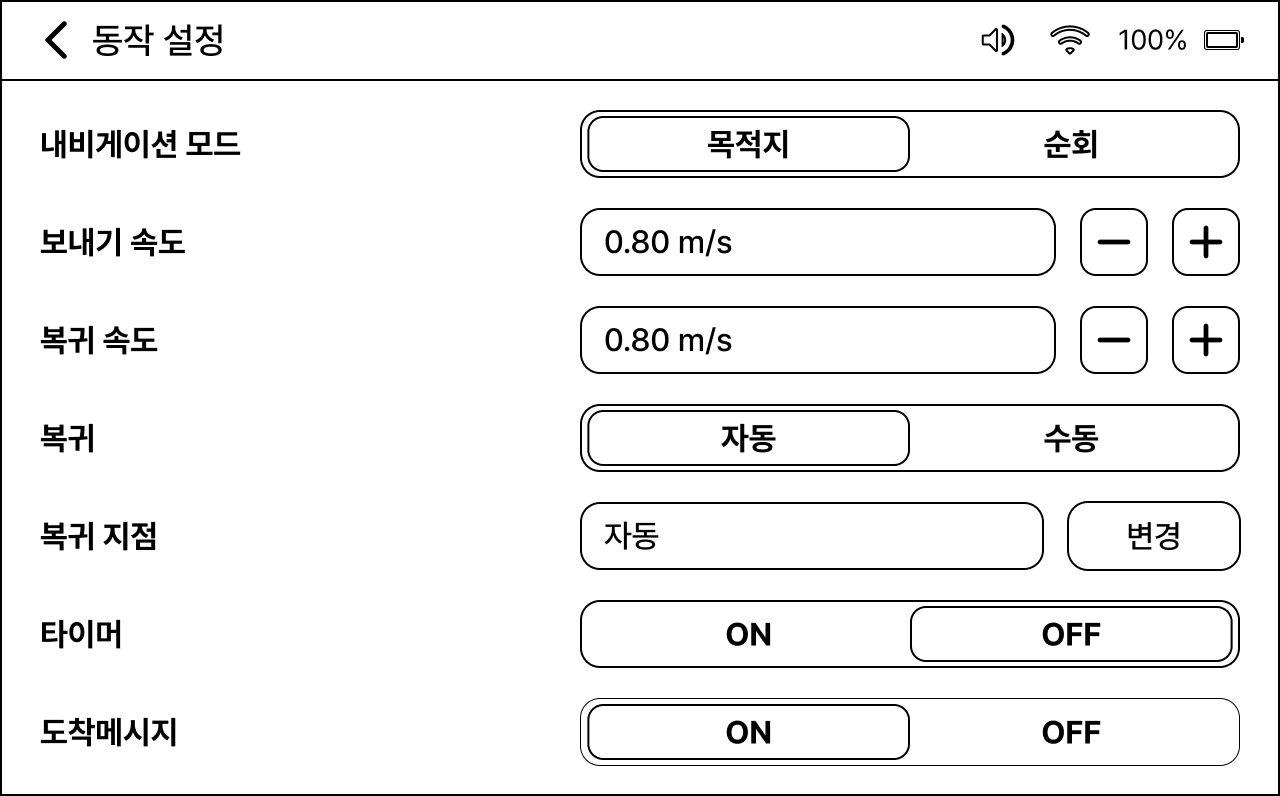
동작 설정
동작 설정에 대한 자세한 설명은 로봇 사용법의 동작 설정을 참고하세요.
상세 설정
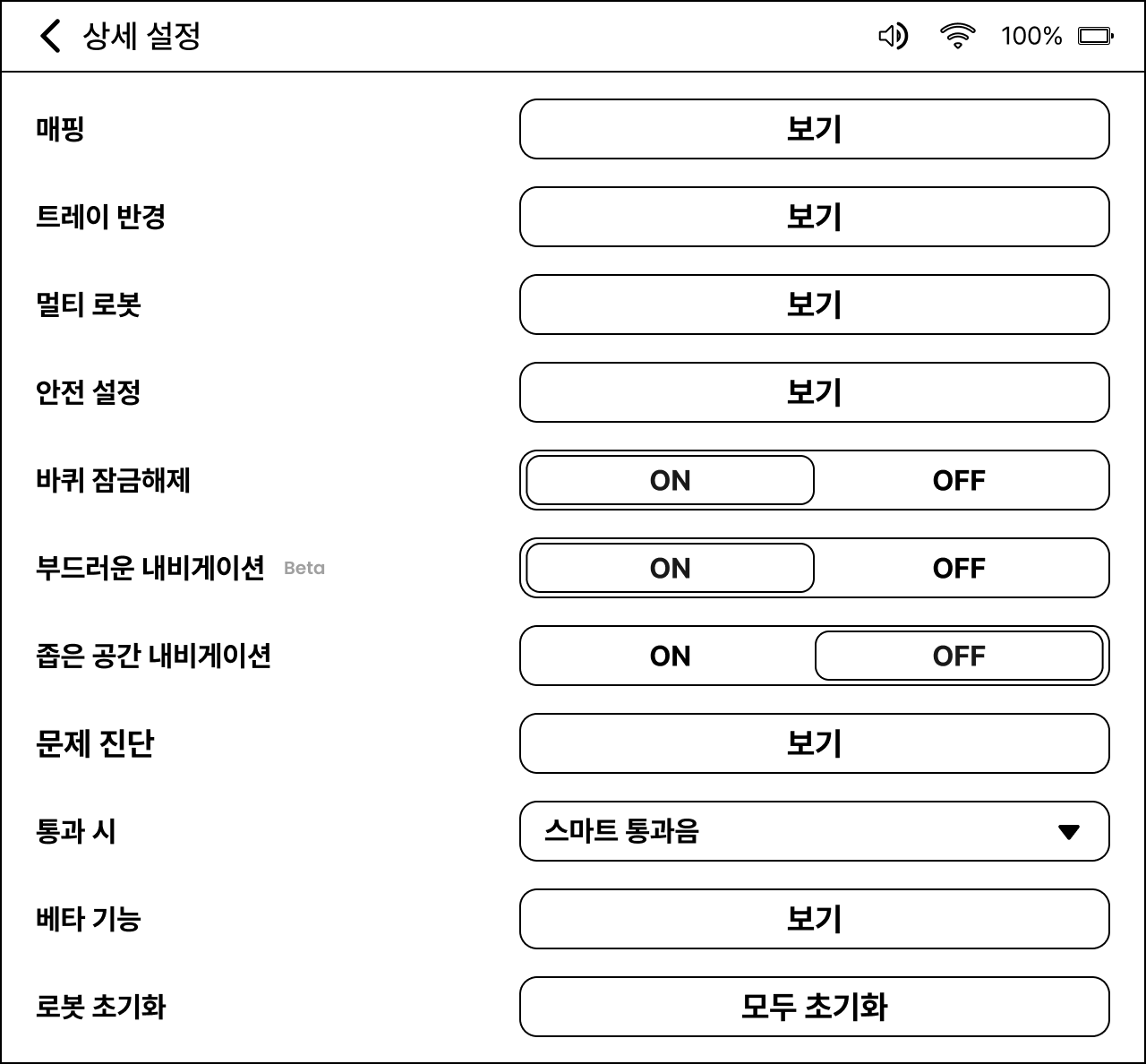
-
로봇의 모드를 설정합니다. 매핑은 관리자가 지도 매핑이 필요한 경우에 사용합니다. 기본적으로 모든 설정이 끝난 후 로봇을 사용할 때는 내비게이션으로 설정되어 있습니다.
-
로봇을 2대 이상 사용할 때 보기를 눌러 멀티 로봇의 세부 설정을 볼 수 있습니다.
-
로봇을 손으로 밀어 이동시키고 싶을 때 사용합니다.
-
목적지에 장애물이 있는 경우 목적지 부근에 정차하여 도착합니다.
-
좀 더 부드러운 주행을 하고자 하는 경우, 사용합니다.
-
좁은 공간을 통과하는 경우, 해당 옵션을 켜 주시기 바랍니다. 최소 75cm를 통과할 수 있습니다.
-
에러가 발생했을 때 화면에 표시됩니다.
-
관리자가 소프트웨어에 버그 관련 문제가 발생하여 리포트를 보낼 때 사용합니다.
-
사람이 가로막는 경우, 음성이 발화하며 사용자에게 안내합니다.
-
새로운 기능을 정식 버전 출시 전에 사용해 볼 . 수 있습니다.
-
로봇을 초기화합니다. 저장되어 있는 지도와 로봇의 모든 정보가 삭제됩니다.
재시작
로봇을 재시작할 때 사용합니다.
이전 페이지다음 페이지Carti 100 Manual