本機の使用方法
使用前の確認事項
本機を安全に使用できる環境条件は次のとおりです。
本機の適正使用温度は10~35℃、適正使用湿度は10~80%です。
水気がなく換気の行き届いた室内で本機をご使用ください。
平らな床で、振動などの衝撃がない場所でロボットをご使用ください。
また、ロボットが移動する経路から障害物を取り除いてください。
移動空間/物体認識範囲
本機が動ける最小移動空間と物体認識範囲の情報は次のとおりです。
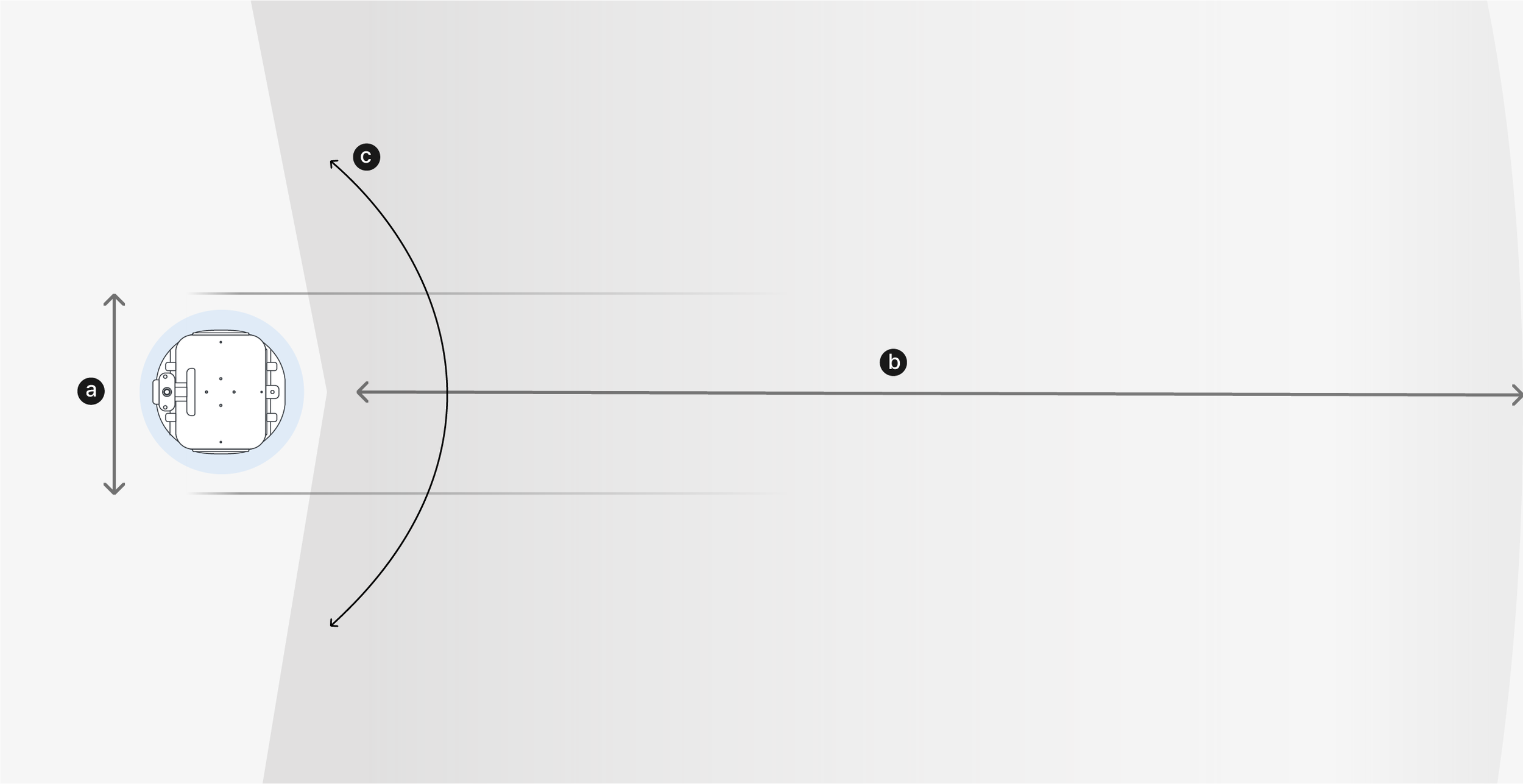
a. 最小幅 (狭い空間ナビゲーション)75~85 cm
b. カバーエリア 230°
c. LiDAR最大検出距離(SW)20 m
本機の移動に必要な最小幅は「狭い空間ナビゲーション」機能を使用する場合は75cm、使用しない場合は85㎝です。本機が安全に移動できるように余裕空間を十分に確保してください。
本機は2D LiDAR、3Dカメラを利用して物体を感知し、対象との距離や位置などの空間情報を認識します。
– 2D LiDAR (LiDAR: Light Detection and Ranging)は、周辺の物体を感知して対象までの距離や方向、スピードなどの情報を測定します。2D LiDARの最大測定範囲は20m、230°です。
– 3Dカメラは周辺の物体までの距離を測定します。3Dカメラの測定範囲は2.5mです。
カメラの測定範囲とセンサーの認識範囲から外れた場所にある障害物は感知し難いため、移動経路から取り除いてください。
– 幅・奥行·高さが5cm x 5cm x 6cm未満の小さな物体
– 高さ6cm以下の床の段差
– 照明やモビールなど空中に吊るしてあるか浮いている物体
– 鏡やガラス素材の物体
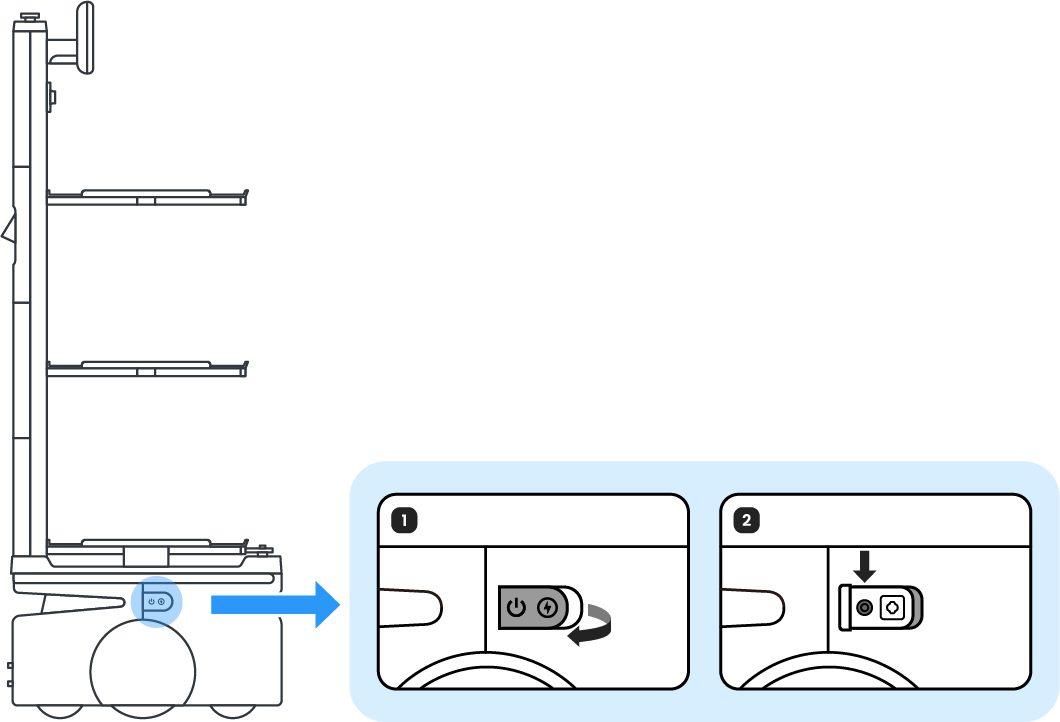
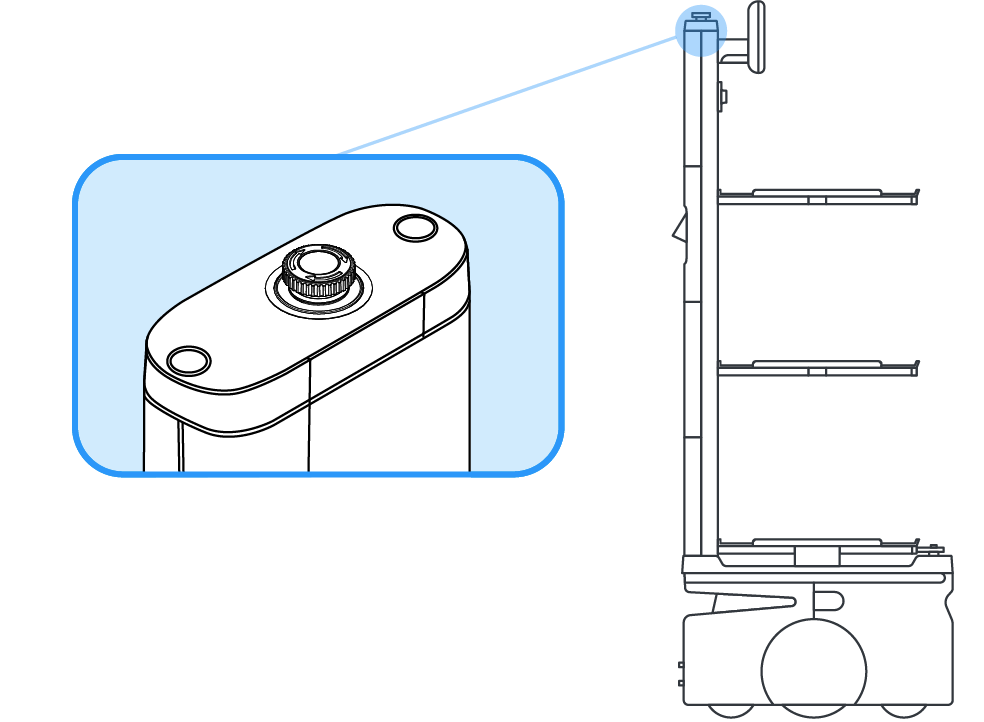
電源オン/オフ
本機の電源ボタンは本体の右下にあります。
充電カバーを空けて左側にある黒い電源ボタンを押します。
本機のタッチスクリーンに起動中画面が表示され、本機のベースLEDライトが点灯します。
本機の電源を切るには、電源ボタンを5秒間押してください。
充電する
本機のバッテリーを充電する方法についてご説明します。
[注意]
構成品として提供された充電アダプタ或いは接触式充電器を使用してバッテリーを充電してください。 そうしないと、本機やバッテリーが損傷する場合があります。
地震や火災などの緊急事態が発生した場合にすぐ電源を遮断できるよう、電源プラグが分離しやすい位置で充電してください。
充電中には本機を使用しないでください。(本機に物を載せたり寄っかからないでください。)
| バッテリー残量確認
バッテリーの残量は画面の右上で確認できます。

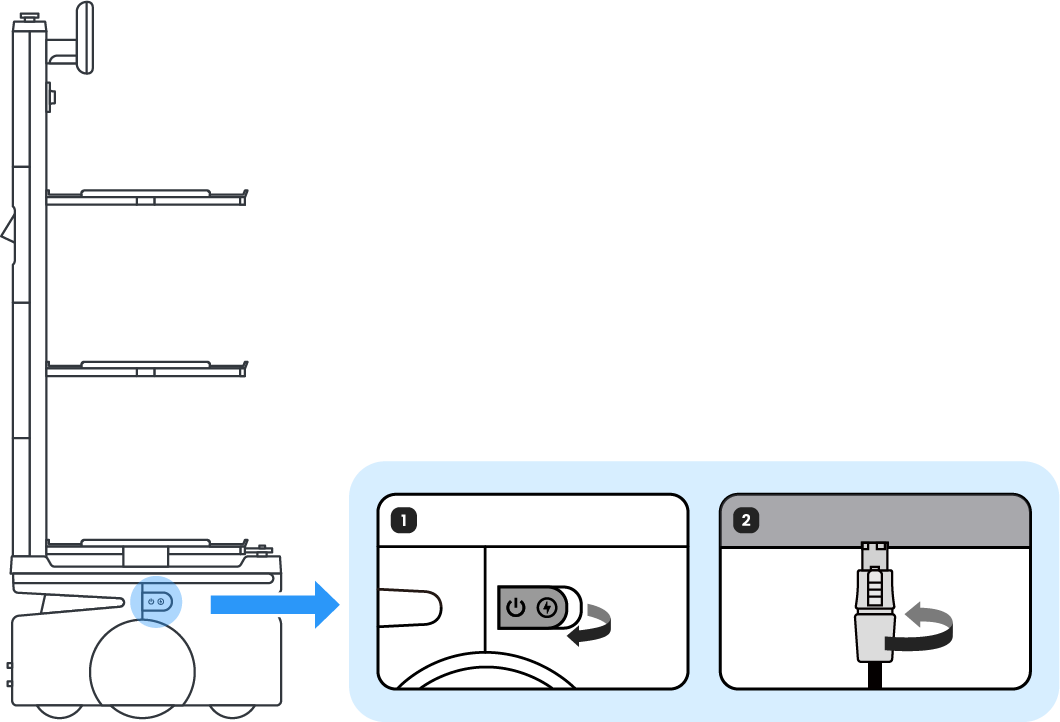
| 有線充電方法
本機の下段にある充電カバーを開けます。
充電アダプタを本機の充電端子に差し込み、電源プラグをコンセントに差し込みます。 充電器を差し込んだ後、右に回してカチッという音がしたら充電が始まります。
※ ServiとServi+をマルチで使用する場合、充電器は混用できます。
| 接触式充電方法
1. 自動充電の場合
ユーザーが指定した充電量未満に達したら、本機はお仕事を完了後、自動的に復帰場所から充電場所へ移動します。
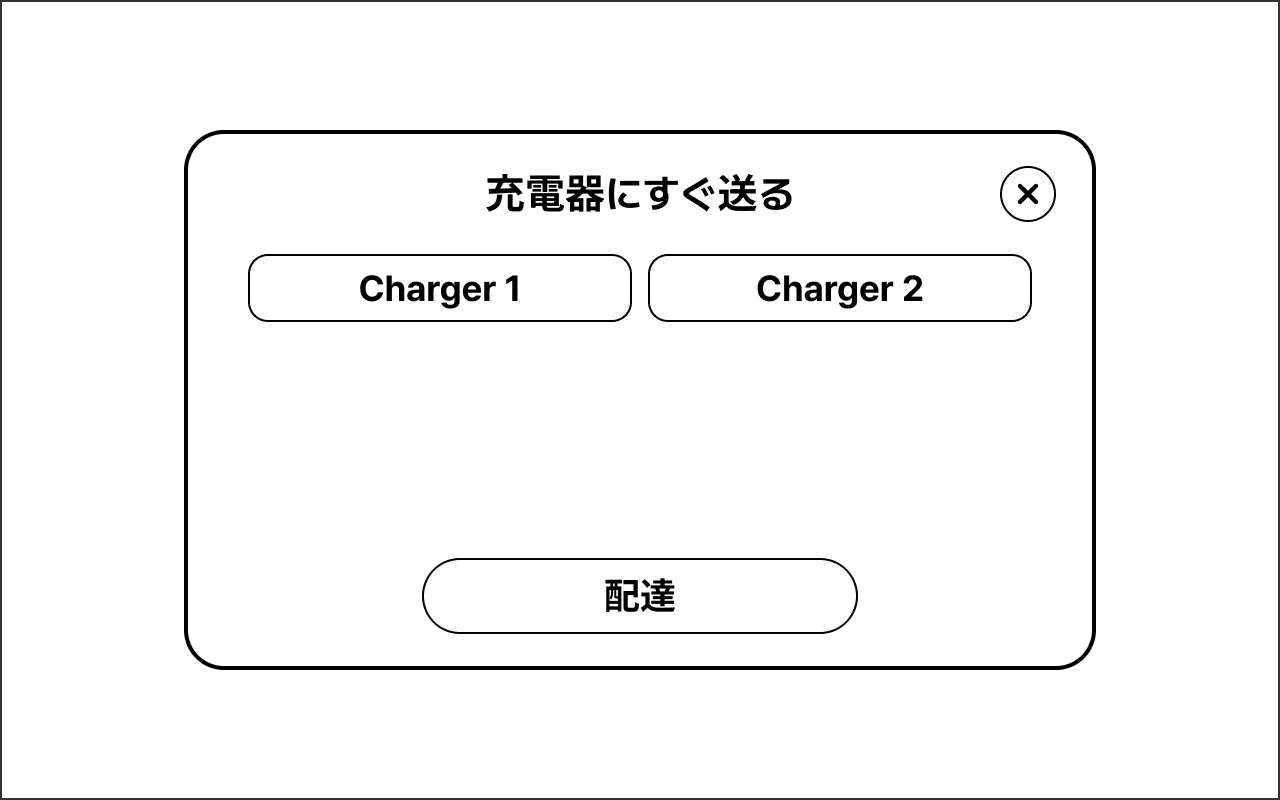
2. タッチスクリーンで充電場所へ送る場合
本機のタッチスクリーンの目的地リストから接触式充電器を選択して出発ボタンを押すと充電場所に移動します。

3. 手動充電の場合
本機を手動で動かして本機の充電端子と接触式充電器が密着するよう位置を調節してください。
本機を奥まで押して、画面に充電中と表示されているかを確認してください。

緊急停止する
本機の前に急に物体が現れたり人が飛び出したりした場合、緊急停止ボタンを押してください。
緊急停止時には車輪がロックされます。
緊急停止を解除するには、緊急停止ボタンを矢印(右)方向に回します。
緊急停止が解除されると進行中のお仕事はキャンセルされ、タッチスクリーンに「一時停止」と表示されます。
以前のお仕事を再開したりキャンセルすることができます。再開或いは新しいお仕事のために本機を送り出すとホイールのロックが解除されます。

もし本機が異常作動したり本機から異常な音や臭い、煙が出たりして本機を緊急停止させる必要がある場合は、緊急停止ボタンを押して電源スイッチを5秒以上押してください。
トレイを使う

使用目的に合わせてトレイの位置と個数を変更できます。
[参考]
勝手にトレイの位置を操作すると故障の原因になる場合があります。
| トレイの高さ調節

| トレイの設置方法
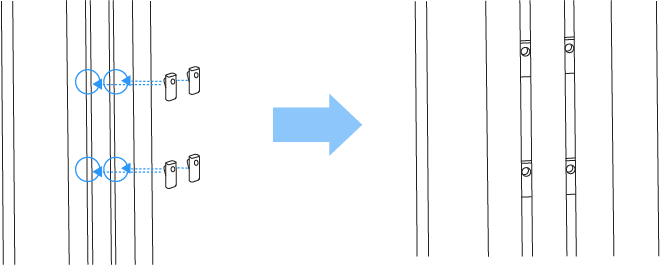
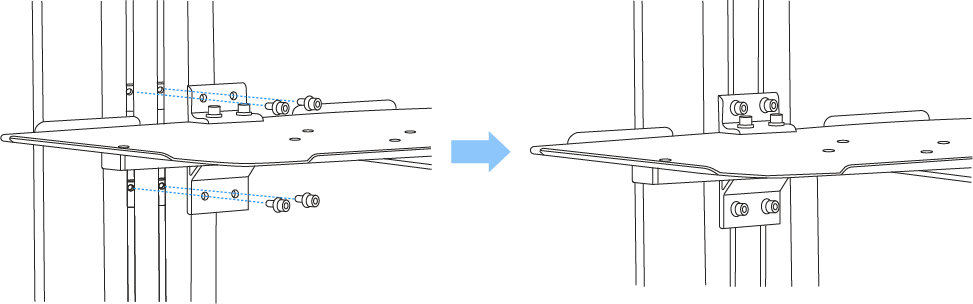
トレイ1個あたり4つのナットをレールに差し込んで、右の図のようにナットを配置します。
* ナットはトレイを組み立てる際に使用する部品です。
トレイのブラケットにある4つの穴の位置が一致するよう配置してください。
ライトについて

| ベースLED
本機の下段部にあり、本機の作動状態によってベースLEDの色が変わります。
[ベースLEDライトの色]
ブート中
待機中
運行中
緊急停止
充電中
緩衝
膠着状態
マルチロボット
虹色
青
緑
赤
黄色
緑
オレンジ
紫
カティ100を使う
| 本機使用までの準備事項
本機のタッチスクリーンに表示される案内に従ってロボットを登録し、マッピングを完了すると使用できます。
ベアロボティクスは、ロボットのモニタリングやロボットの動作設定、ロボットガイドそして問題解決方法をいつどこでも確認できるクラウド基盤のサービスを提供しています。
設置のためにはServi管理システムのユニバースに入会する必要があります。 入会ご希望の際はベアロボティクスにお問い合わせください。
| ロボットの初期設定
ロボットを使うためにはロボットの登録とマッピングプロセスが必要です。 タッチスクリーンの案内に従ってロボットの初期設定を完了します。
○ 1段階:ロボットの登録

ロボットの電源を入れ、タッチスクリーンに表示される順番に従ってロボットを登録します。 ユニバースで位置を作成し、ロボットのタッチスクリーンに表示される4桁のコードを入力して登録を完了します。
○ 2段階:空間マッピング
タッチスクリーンの案内に従ってロボットをあちこち運転し、ロボットがカメラとLiDARを利用して空間をマッピングできるようにします。

マッピング完了後、マップをアップロード
目的地の追加はタッチスクリーンとユニバースの両方でできます。
[注意]
マッピング開始ボタンを押す前に、壁面に向けてから始めてください。透明な壁や任意の場所から開始すると、マップの画像が斜めにずれることがあります。
タッチスクリーンでマッピングを完了し、ユニバースでマップのタブをクリックしてから更新(F5)を押します。ロボットから転送されたマップの画像と目的地情報が表示されます。
ツールボックスで目的地を追加し、ロボットが行ってはならない場所を障害物と領域で指定して、ロボットに行ける場所を教えます。
○ 3段階:マッピング完了

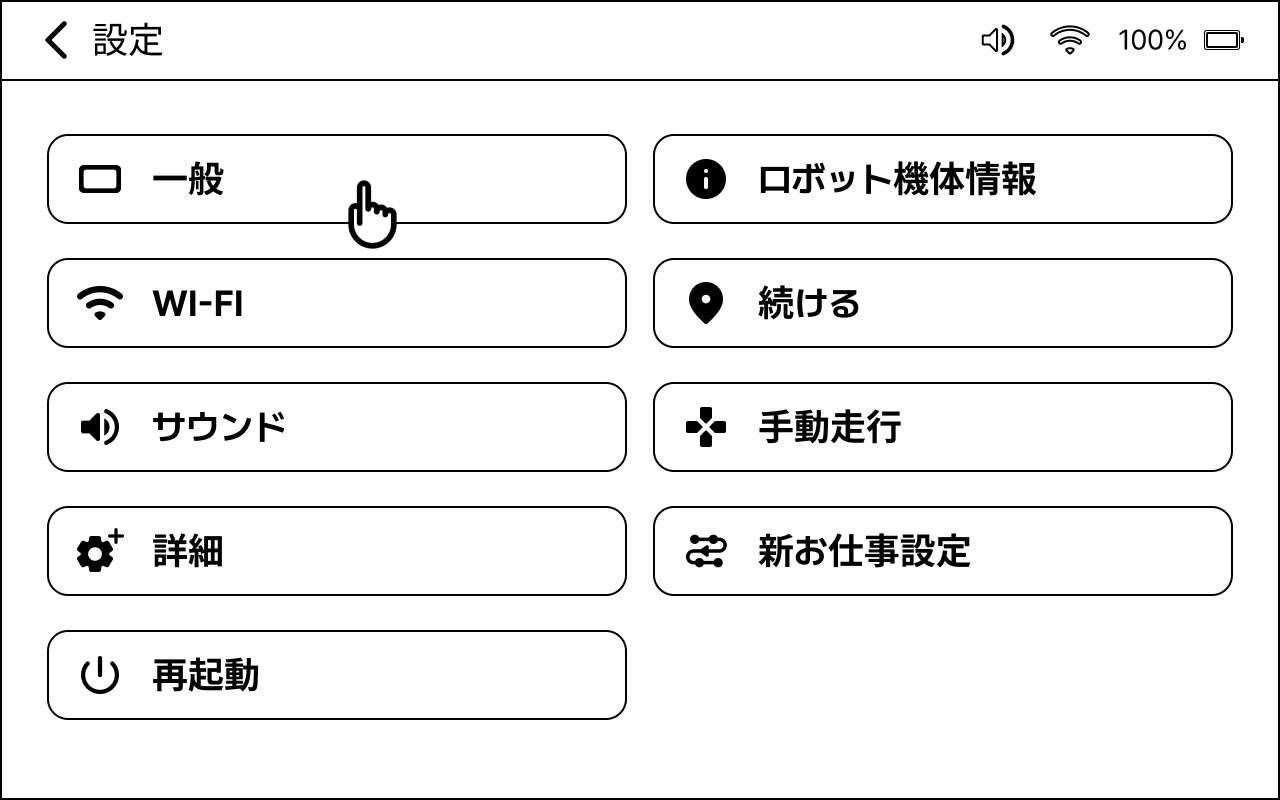
タッチスクリーンの左上にあるロボットの名を長押し(2~3秒)すると設定画面に移動します。
○ 4段階:設定に移動

マップ設定や目的地の位置などをすべて設定した後、ロボットを使う前にロボットに自分の現在地を教えるためにロボットの位置設定に移動します。ロボットがいる場所と目的地名が同じ場所かどうか確認した後、当該目的地名を押して確認ボタンを押します。
又はホーム画面でロボットが立っている目的地を長押しすると、すぐに位置配置できます。
○ 5段階: ロボットの位置設定

さまざまなモードで物を運んでくれます。必要な用途に応じてナビゲーションモードを目的地や巡回モードに設定できます。
○ 動作設定の基本画面
動作設定を使う
| 動作設定
設定で動作設定を押します。
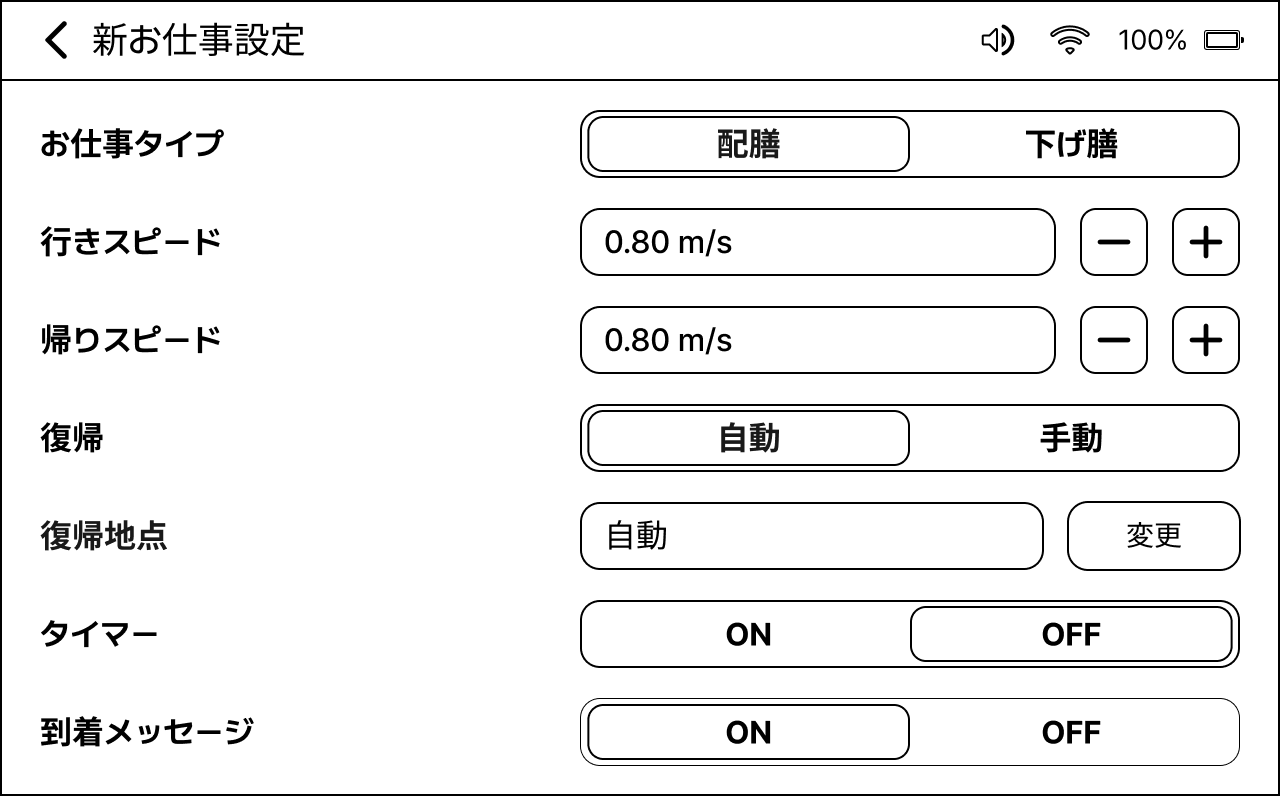
下の画像はロボットを登録した後、基本設定された動作設定画面です。
-
目的地: 基本設定項目です。
巡回: 指定された頻繁に使う経路或いは選択した目的地への巡回を繰り返します。巡回を選択すると復帰設定項目は自動的に非表示になります。
-
本機が目的地に移動するときのスピードを指定できます。基本スピードは0.80m/s、最大スピードは1.2m/sです。
-
本機が目的地に復帰するときのスピードを指定できます。基本スピードは0.80m/s、最大スピードは1.2m/sです。
-
自動が基本設定になっています。すべてのお仕事が終了すると指定された復帰地点に移動します。
自動の場合はタイマー設定をオンにした場合に作動します。
設定された時間が経過すると自動的に復帰地点に移動します。手動の場合は到着画面で次のボタンを押すと復帰地点に移動します。
-
復帰地点を特定の場所に変更するには、変更を押してから保存された目的地の一つを選択します。
-
本機が目的地に留まる時間を設定します。タイマーを希望する場合、ONを押してから待機時間を設定します。希望しなければOFFに設定してください。
-
本機が目的地に到着すると「目的地に到着しました」という案内音声が流れます。希望しなければOFFに設定してください。
| よく使う経路設定
よく使う経路を設定することによって、動作設定のナビゲーションモードで巡回機能を活用できます。
画面左上を2~3秒間押します。
設定画面に移動します。
画面左上の最初の一般を押します。
経路リストを押して経路作成画面に移動します。次のページに表示されるガイドに従って経路を作成します。
経路を作成後、前の画面に戻ってよく使う経路をONに設定します。
○ 設定する

状態メッセージについて
本機が走行中、障害物のためにミッションを遂行できなかったり、位置エラーなどが発生したりした場合、画面に状態メッセージが表示されます。このとき、本機の下段のベースLEDが赤、オレンジ、そして黄色に変わります。
道が塞がっています
まず本機がお仕事を開始する位置で、位置のリセットを行います。
本機の移動経路に障害物があれば取り除き、本機を手動で押して位置を変更します。
カメラセンサーの前に異物がないか確認してください。
道が塞がっています
状態メッセージ
緊急停止する
ミッション失敗
確認/措置事項
バッテリー不足
緊急停止する
本機走行中に緊急事態が発生した場合、緊急停止ができます。
本機の上段部或いは下段部にある赤いボタンを押すと、本機が走行を止めます。
緊急停止を解除するには、ボタンを矢印方向(右)に回します。
解除後は以前のお仕事を再開したりキャンセルできます。
バッテリー不足
バッテリー残量が10%になると「バッテリーが不足しています」という画面表示と案内音声が流れます。
バッテリーの充電方法は「充電する」を参考にしてください。
ミッション失敗
様々な原因で最終的にミッションに失敗した場合に表示されます。
ネットワーク又はカメラに問題が生じたとき
本機が道に迷ったときなど
既存のミッションは消えるため、ホームに移動してから新しいミッションを遂行します。
前のページ次のページCarti 100 Manual